Ce que nous entendons par Opensource, c’est le principe de mettre en ligne à dispostion de tous des documents, plans, schémas, méthodes et tutoriels pour permettre au plus grand nombre d’en profiter et cela gratuitement !
Sans réinventer la poudre mais cela demande tout de même de se plonger au coeur du sujet sérieusement, nous vous proposons de réaliser votre propre centrale de navigation !
Une centrale de navigation est l’ordinateur qui vous permet de gérer vos navigations, elle permet de réaliser vos opérations de cartographie et centralise l’ensemble des données utiles à la navigation et collectées par les différents capteurs présent sur votre navire (vent, cap, position, vitesse du bateau etc…). La plupart du temps ce sont des ordinateurs similaires à celui qui vous avez chez vous (mis à part qu’ils fonctionnent en 12 ou 24V), c’est à dire beaucoup trop puissant et cher par rapport au besoin d’un plaisancier lambda. De plus, avec ces ordinateurs standards, sous licences privées, vous êtes limités dans la personnalisation et la réparabilité de votre matériel. Dans notre cas, nous avons donc utilisé des cartes électroniques de type Raspberry.
C’est quoi une Raspberry ?
C’est en quelque sorte un ordinateur en miniature. Cette carte électronique, qui permet d’utiliser un système d’exploitation (Exemple : Window, IOS) open source, a été originellement crée pour enseigner le code informatique. Son faible coût (environ 50 euros pour la version Pi 3B+), sa faible consommation d’énergie et ses nombreuses possibilités l’ont popularisé notamment pour des applications embarqués demandant une puissance de calcul importante (drones, robots etc…).
Sur un voilier la faible consommation d’énergie est un intérêt évident.
Description de la centrale de navigation et de ses éléments
Le schéma ci-dessus, que l’on peut appeler diagramme haut niveau, décrit le fonctionnement de l’électronique de bord. Il explicite les composants principaux, la nature de leurs connexions et les différentes interfaces physiques et logiciels avec l’utilisateur.
La Raspberry Pi principale correspond à la partie logicielle du shéma. C’est le coeur du système et utilise le système d’exploitation libre de droits “OpenPlotter” (https://openplotter.readthedocs.io/en/latest/getting_started/downloading.html) , c’est sur celle-ci que les différents capteurs transmettent leurs données. Le logiciel de cartographie en libre accès OpenCpn (https://opencpn.org/OpenCPN/info/downloadopencpn.html ) permet de réaliser les opérations de cartographie en affichant la position GPS du bateau sur une carte marine, les positions des autres bateaux présents dans la zone via le système AIS et compile les différentes données des capteurs (vitesse du vent, vitesse du bateau, cap, profondeur etc…).
L’écran d’affichage est un écran d’ordinateur portable réutilisé. Nous avons récupérer l’écran (ou “dalle” en jargon électronique) d’un vieil ordinateur défectueux. Il vous suffit de quelques tournevis pour l’extraire et celui-ci fonctionne en 12V ce qui est parfait pour le cas d’un bateau. Il ne vous restera qu’à gérer l’alimentation et la connexion raspberry/écran via un controleur ( lcd controller board ). Vous trouverez sur l’excellent site de Manwë un tutoriel complet qui explique comment réaliser ce montage en détail ( http://www.manweodyssey.com/ecran-12v-ordinateur-bateau/ ).
Le Boitier GPS et AIS et un système opensource dénommé MAIANA ( https://github.com/peterantypas/maiana ). Le boitier connecté via USB à la raspberry est composé d’un récepteur GPS et d’un émetteur/transmetteur AIS, une antenne reliée au boitier permet la transmission des données. Le GPS est un système de positionnement via satellite comme sur votre téléphone portable. L’AIS est un système de transmission d’informations entre navires qui repose sur les ondes radio. Nous émettons en continue notre position GPS et des informations sur notre bateau (taille, identification, nationalité etc…). Cela permet de repérer les bateaux proches lors des navigations et d’éviter les collisions notamment la nuit.
Le pilote automatique est basé sur le système opensource PyPilot ( https://pypilot.org/ ). Il est composé d’une unité de puissance : un vérin hydraulique qui agit physiquement sur le système de barre, d’une Raspberry Pi zéro qui sert de calculateur pour traduire le cap à tenir en commande pour le moteur de vérin et d’une carte Arduino utilisé comme le contrôleur du moteur de vérin. Le tout communique en wifi avec la Raspberry principale. Ce même réseau Wifi est également utilisé pour connecter sans fil d’autres appareils à la centrale de bord Pour ceux qui voudrait entrer dans les détails nous avons réalisé un article dédié sur l’installation du pilote automatique : [DIY] Pilote automatique
L’anémomètre permet de mesurer la force et la direction du vent. Dans notre cas nous avons changé le capteur anémomètre initialement présent à l’achat du bateau. Pour continuer à utiliser l’afficheur de l’ancien anémomètre qui fonctionnait en signal analogique, nous avons réalisé un montage via une carte arduino pour convertir la trame NMEA du capteur vers l’afficheur analogique et vers la raspberry.
Le speedomètre et le profondimètre sont un seul et même instrument dans notre cas qui mesure la vitesse du bateau et la profondeur sous la coque. Avec un simple bricolage, nous recevons également les valeurs sur notre centrale de navigation. Voici l’article qui nous a inspiré.

Détail du coût de l'installation
En plus de la satisfaction de réaliser vous même votre éléctronique marine, cette démarche nous a permis de réduire drastiquement les coûts d’une telle installation. Ci dessous vous trouverez un tableau récapitulatif associé.
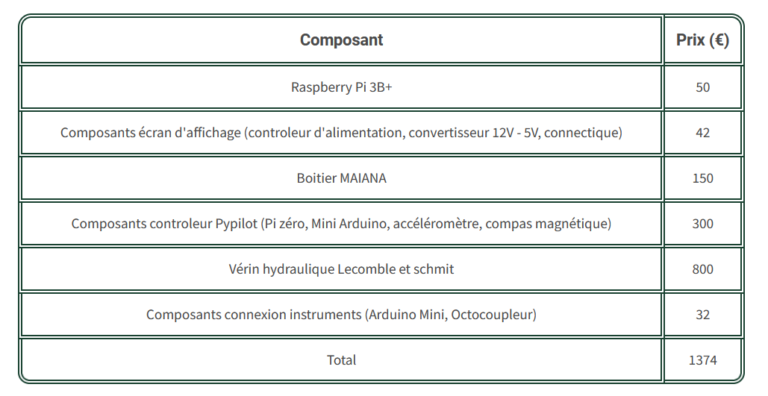
A titre de comparaison, un ensemble calculateur/controleur/unité de puissance d’un pilote automatique se vend entre 3000 et 5000 € sur le marché de l’occasion ! Une belle économie dans le budget du refit !
Bilan à mi-parcours
Après plus d’un an de voyage, nous sommes très satisfaits des différentes solutions opensource que nous utilisons ! Les quelques 18 000 miles parcourus ont été réalisé sans problèmes majeurs, notamment le pilote automatique qui tourne à plein régime sans faillir ! Le système MAIANA de positionnement et d’AIS nous donne également pleine satisfaction, aucun bug de positionnement ou autres à déplorer, nous savons toujours où nous sommes ! 😉
La centrale de navigation à base d’une Raspberry Pi fonctionne également parfaitement, elle tourne 24h/24h lors des navigations, pendant parfois 30 jours d’affilé, et nous n’avons jamais eu de problèmes. L’utilisation de l’Opensource nous a permis d’implémenter de nouveaux systèmes mais également de conserver nos anciens éléments (afficheurs, capteurs etc…) et d’intégrer l’ensemble au sein d’une même installation.
Finalement, réaliser nous même notre électronique de bord nous aura coûté quelques noeuds aux cerveaux et pas mal d’heures de travail mais le jeu en vaut la chandelle !



